Egy órán belül magabiztosan jár az „újszülött” robotkutya
Bár a robotika a leggyakrabban arra törekszik, hogy mesterséges megoldással lemásolja a természet alkotta evolúciós képességeket, lassan nem kell beérni azzal, hogy pontosan utánozzák Földanya teremtményeit, hiszen tovább is fejleszthetik őket. A németországi Max Planck Intézet tudósai a lovakra és zsiráfokra jellemző gyors talpra állás képességével akarták felruházni a robotjukat – de más anatómiai felépítés mellett, és arra is gondot fordítottak, hogy a bizonytalanul reszkető csikóktól eltérően az „újszülött” gép mihamarabb megtanuljon magabiztosan járni.
A program, amit a feladathoz írtak, az állatok mesterséges gerincvelőjeként működik, csak éppen a természetes megjelenésnél jelentősen hamarabb, akár egy óra alatt képes optimalizálni a robot mozgását – számol be a Science Daily. Hasonló képességnek az igazi állatok is nagy hasznát vennék, hiszen a fentebb említett patásoknál éppen azért alakult ki a születés utáni, szinte azonnali talpra állás képessége, hogy mihamarabb el tudják kerülni a ragadozókat. Ezt éppen a gerincvelő izomkoordinációs hálózatának fejlettsége miatt tudják kivitelezni: először a lábizmok és inak mozgatását sajátítják el, és jelen van néhány alapvetőbb motoros kontroll, ami az elesést és a sérüléseket előzi meg. A következő, eggyel fejlettebb fázisban precíz izomkoordináció lép fel, és az idegrendszer is pontosabban alkalmazkodik a mozgáshoz, hogy magabiztos járás alakuljon ki. Nos, a stuttgartiak robotkutyája mindezt egy óra alatt, önállóan megtanulja.
„Mérnökként és robotikai szakértőként olyan választ kerestünk erre a problémára, hogy az állatunk reflexei ugyanúgy működjenek, mint a természetben, és képes legyen tanulni a hibáiból” – magyarázta Felix Ruppert, az intézet Dynamic Locomotion kutatócsoportjának korábbi doktorandusza. „Ha egy állat megbotlik, az hiba? Nem, ha csak egyszer történik meg. De ha gyakrabban megbotlik, akkor mérhetővé válik, hogy a robot mennyire jár jól.”
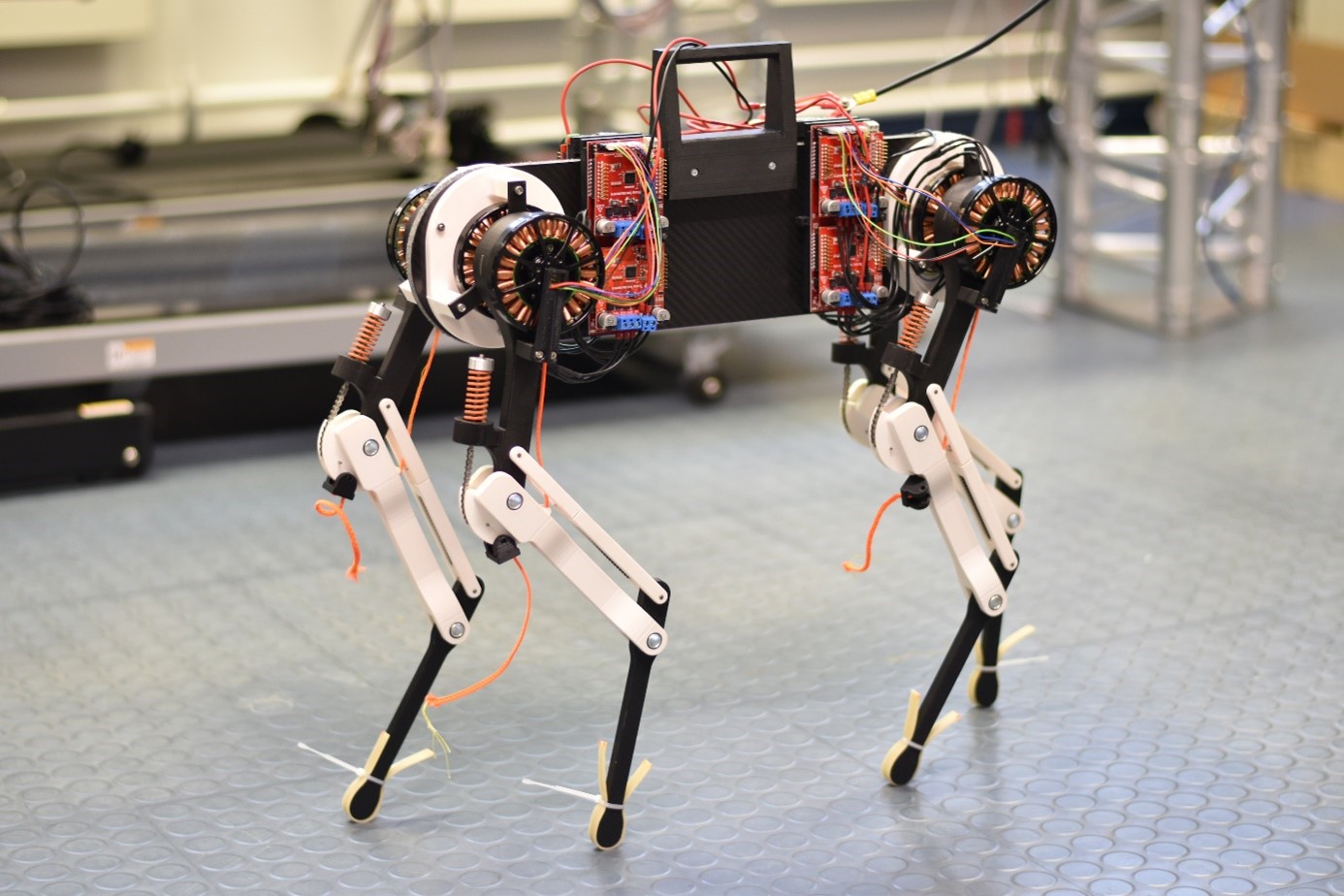
A tudós által alkotott gép a lehető legjobban használja ki a lábak mechanikáját, míg az optimalizáló algoritmus – a lábszenzorok által mért adatok segítségével – a tanulást irányítja. A robot úgy tanul meg járni, hogy folyamatosan összehasonlítja a feltételezett és a küldött, valós szenzorinformációkat, majd reflexhurkokat futtat, és az eredmények alapján módosítja a motorvezérlés mintáit. Ezt a rendszert központi mintagenerátornak (CPG) nevezték el, és egy labrador méretű robotkutyába, Mortiba építették be. Ha az eb megbotlik, a tanulási algoritmus megváltoztatja, hogy a lábak milyen messzire mozduljanak ki előre-hátra, illetve azt is, hogy milyen gyorsan lendüljenek, és mennyi ideig maradjanak a földön. A tanulási folyamat során a CPG adaptált motorjeleket küld, így a robot egyre kevesebbszer hibázik, és optimalizálja a járást.
A Max Planck Intézet robotja gyakorlatilag úgy születik, hogy semmit sem tud a lábainak anatómiájáról és működéséről, mégis egy óra alatt megtanulja a magabiztos mozgást. Ez sokkal több, mint a természetes gerincvelő leutánzása, mivel egyenesen modellezték és továbbfejlesztették azt – mutat rá Alexander Badri-Spröwitz, a tanulmány társszerzője. „Tudjuk, hogy a CPG-k sok állatban léteznek, és a reflexek beágyazottak, de hogyan kombinálhatjuk ezeket úgy, hogy az állatok reflexekkel és CPG-kkel tanulják meg a mozgásokat?” – tette fel a kérdést, megjegyezve, hogy a kutatásuk nem csupán robotikai vagy biológiai, mivel egyedülálló módon a két tudomány metszéspontjában találkozik. „A robotmodelltől választ kapunk olyan kérdésekre, amelyekre a biológia önmagában nem tud válaszolni” – fűzte hozzá.
Gábor János, Okosipar.hu