Így egyenesedik fel az egyszerre két- és négylábú robot
Nagy áttörést jelenthet a robotok gyártásában és használhatóságában az az új eredmény, amit a 2022 IEEE/RSJ Nemzetközi Konferencián mutatott be egy amerikai és egy kínai egyetem. A közös projekt alapján mostantól nincs szükség rá, hogy egy lábakkal rendelkező robotot a későbbi funkciójának függvényében két- vagy négylábúnak tervezzenek, hiszen egyszerre lehet mindkettő!
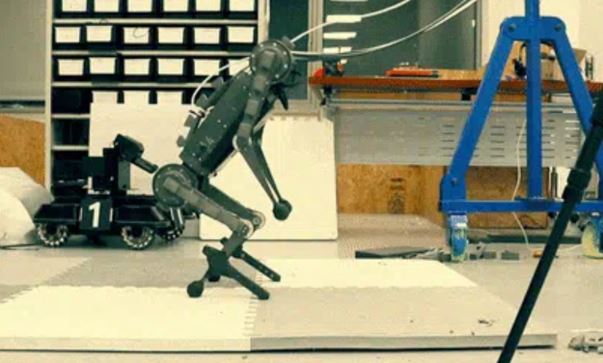
Bár a négylábú jelző nem túl nagy meglepetésre magában hordozza, hogy négylábú robotról van szó, a legújabb eredmények ismeretében messze nem törvényszerű, hogy az adott gép sosem fog két lábra állni – vonja le a következtetést az IEEE Spectrum. A massachusetts-i Worcester Politechnikai Intézet és a ShanghaiTech Egyetem olyan projekt első eredményeit prezentálta a kiotói IEEE/RSJ konferencián, amiben stabilan és egyszerűen tudtak felegyenesedett járásra bírni egy lecsupaszított Spotra emlékeztető négylábú robotot. A gép persze a feladatellátás függvényében újra négykézlábra tud ereszkedni, majd újra felállni és két lábon járni, ha éppen arra van szükség. Meredek látni, ahogy az egyelőre még „bizonytalan” robot mellső lábai szabályosan megremegnek, mikor számára új mozdulatsort kell végrehajtani a tanulási folyamatban. Szinte szívszorító:
Persze nem ez az első olyan konstrukció, ami négylábú-kétlábú mozgás váltakozásával próbálkozik, de robotikai szempontból ennél egyszerűbb és költséghatékonyabb alkalmazást nehéz elképzelni. Ahelyett, hogy a tervezésnél a két merőben eltérő testhelyzetnek megfelelően, a nulláról építették volna fel, inkább egy meglévő technológiából kiindulva hoztak létre teljesen új, az eredetinél nagyságrendekkel fejlettebb, mégis olcsóbb megoldást.
A mechanikai probléma adta magát: plusz támasztékra volt szükség a felegyenesedéshez és két lábon járáshoz. Erre válaszul terveztek, majd 3D nyomtatással legyártottak két, a robot hátsó lábaira illeszkedő kiegészítő alkatrészt. A felegyenesedést vezérlő algoritmusok ráveszik a gépet, hogy részben a két új „nyúlványra” helyezze át a súlypontját, ha fel kell állnia és úgy járnia, vagy éppen vissza kell ereszkednie.
Andre Rosendo, a Worcester Politechnikai Intézet kutatója hangsúlyozta: két nagyon különböző világ előnyeinek összekapcsolására törekedtek, mivel egyetlen gépben akarták ötvözni a négylábú robotokra jellemző stabilitást és gyorsaságot, valamint a kétlábúakat meghatározó manipulációs képességet és megnövelt működési magasságot. Sikerült, és ez – az ötlet minden egyszerűsége ellenére – paradigmaváltó eredmény lehet.
Gábor János, Okosipar.hu