E-IOT eszközökkel történő helymeghatározás (LBS és GNSS) – 1 .rész
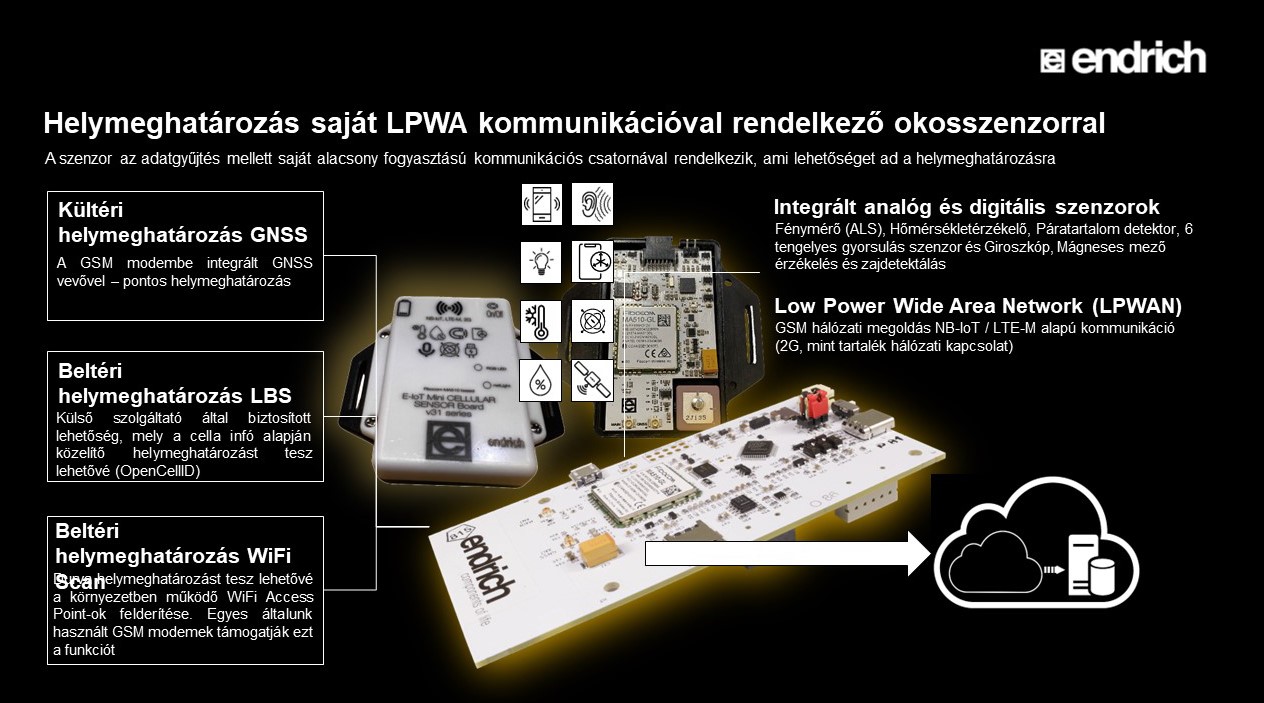
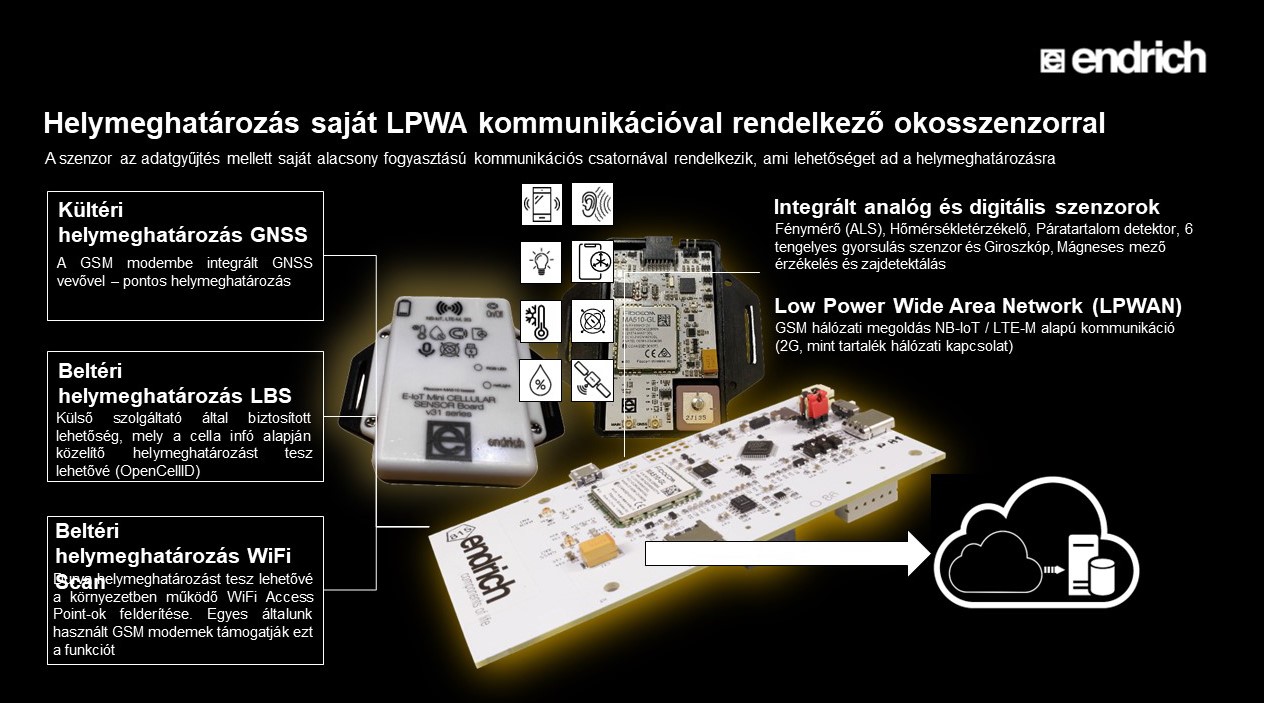
Az eszközök által gyűjtött szenzoradatok mellett néhány egyéb adatra is nagy szükség van IoT alkalmazásokban ahhoz, hogy a rendszerek működése nyomon követhető legyen. Ilyen adat például a mintavételezés ideje, az eszköz azonosítója, a firmware verziószáma, és egyes alkalmazásokban nagyon fontos lehet a geolokalizáció. Mozgó eszközök esetén azok nyomon követése, kihelyezett szenzorok esetén meglétük és pozíciójuk ellenőrzése igényli a pontos helymeghatározást. Kültéren kiváló szolgálatot tehet az integrált GNSS modul, azonban a beltéri helymeghatározás esetenként sokkal összetettebb feladat. Most indított cikksorozatunkban ezt a témát szeretnénk körüljárni konkrét megvalósítási példákon keresztül az E-IoT (Proof of Concept) okosszenzorokba integrált helymeghatározási algoritmusok ismertetésével. A sorozat első részében a műholdas globális helymeghatározás és a GSM modemek által hozzáférhető egyéb helymeghatározási funkciók kerülnek áttekintésre.
Helymeghatározás alapú szolgáltatások
Az elektronikai eszközök szolgáltatásainak témakörében helymeghatározás alatt a köznyelvben ma jórészt a műholdas globális helymeghatározást értjük, de ennél sokkal több technológia használatos. Tekintsük át a fogalmi különbségeket a GNSS (Global Navigation Satellite System) és az LBS (location based services) között.
Meghatározás:
A GNSS (globális navigációs műholdrendszer): Ez egy általános kifejezés, amelyet a világméretű lefedettséget biztosító műholdas navigációs rendszerekre használnak. Az GNSS példái közé tartozik a GPS (globális helymeghatározási rendszer), a GLONASS (Globális Navigációs Műholdrendszer), a Galileo és a BeiDou. Az GNSS lehetővé teszi az eszközök számára, hogy a műholdakból érkező jelek alapján meghatározzák pontos helyzetüket.
Az LBS (helymeghatározáson alapuló szolgáltatások): Ez a kifejezés azokat a szolgáltatásokat jelenti, amelyek az eszköz helyzetinformációját használják fel konkrét szolgáltatások vagy információk nyújtásához. Az LBS különböző technológiákat használ, beleértve az GNSS-t, de szélesebb körű alkalmazásokat foglal magában a műholdas pozícionáláson túl is.
Terjedelem:
GNSS: A műholdkonstellációkra és azok használt technológiáira összpontosít, hogy pozícionálási és navigációs célokat szolgáljon.
LBS: Különféle szolgáltatásokat és alkalmazásokat foglal magában, amelyek helyinformációt használnak, például térképi szolgáltatások, GSM cellainformációkon alapuló helyi keresés, WiFi hálózatok adta helyadatok, helymeghatározás alapú reklámok és közösségi hálózati bejelentkezések.
Technológia:
GNSS: Műholdak jelzéseire támaszkodik a pontos helyzetinformáció biztosításához. Több műhold jeleit használja fel az eszköz pozíciójának háromszögeléséhez.
LBS: Különféle technológiákat használ, ideértve az GNSS-t, de más módszereket is alkalmazhat, például Wi-Fi helymeghatározást, cellatömb triangulációt és szenzor adatokat a készülék helyzetének meghatározásához.
Alkalmazás:
GNSS: Főként navigációhoz, térképezéshez, felméréshez és más helyspecifikus alkalmazásokhoz használható, amelyek pontos pozícióinformációt igényelnek.
LBS: Széles körű alkalmazásokhoz használható, ideértve a helymeghatározáson alapuló reklámokat, közösségi hálózati bejelentkezéseket, helyi kereséseket, vészhelyzeti szolgáltatásokat, valamint eszközfelügyeleti és követési feladatokat is képes ellátni.
Függőség:
GNSS: Kizárólag a műholdjelekre támaszkodik a helyzetinformációért.
LBS: Több helymeghatározási technológiát is integrálhat, beleértve az GNSS-t, de alternatív módszereket is alkalmazhat olyan helyzetekben, ahol az GNSS-jelek gyengék vagy nem elérhetőek.
Összefoglalva, az GNSS a pontos globális pozícionálást biztosító technológia, míg az LBS a helyinformációt felhasználó szolgáltatások és alkalmazások széles skáláját foglalja magában. Az GNSS az LBS részeként is funkcionálhat, de az LBS egy szélesebb fogalom, amely többféle helymeghatározó alkalmazást ölel fel. Előbbi pontos helymeghatározást tesz lehetővé, utóbbi -GNSS hiányában – cella információk, vagy elérhető, ismert elhelyezkedésű Wi-Fi HotSpot-ok jelerőssége alapján alkalmas – akár beltéri – helymeghatározásra.
A műholdas globális helymeghatározás (GNSS)
A globális helymeghatározás egyre megszokottabbá válik a mindennapjainkban a közlekedés területén, az autók gyári GPS vevőkkel rendelhetők, az elektronikai boltok kínálatában pedig számtalan konfigurációban elérhetők ezek az eszközök különféle feladatokra. A hajózásban és a légi közlekedésben is magától értetődő a használatuk. Vannak olyan területek is a mindennapi életben, ahol szintén fontos, bár kevéssé ismert a globális helymeghatározás szerepe. A precíziós földművelés során a kombájnok ezt használják a betakarításra kijelölt terület határainak betartására, hálózatok földrajzilag elkülönülő részeinek szinkron működése is GNSS eszközökön alapul, de fontos a szerepe például a bankkártya tranzakciók vagy az energiaelosztás területén is. Az IoT eszközök helyadatainak ismeretében pontosan feltérképezhető egy adott terület környezeti adatainak eloszlása, egyszerűen követhető ezen eszközök földrajzi elhelyezkedése és a szenzoradatokkal együtt beküldött geolokalizációs koordináták alapján a szenzorok távfelügyelete is lehetségessé válik.
GNSS (Global Navigation Satellite System – globális helymeghatározó műholdrendszer) a gyűjtőneve azoknak a SAT alapú navigációs rendszereknek, melyek autonóm földrajzi helymeghatározásra alkalmasak a Föld teljes felszínén. Több ilyen rendszer van a megvalósítás fázisában, vagy rendelkezik már a szükséges műholdakkal és földi állomásokkal, néhány közülük globális, mások még csak lokális pozíció adatokat szolgáltatnak. Jelen írásunkban szeretnénk ezeket a rendszereket áttekinteni, és bemutatnánk néhány olyan eszközt (vevőmodulokat, „okos” antennákat és időzítő modulokat), melyek kihasználva a fenti SAT rendszerek közti interoperabilitást, a pontosság tekintetében számos előnyös tulajdonággal rendelkeznek a hagyományos GPS alapú vevőegységekkel szemben.
GNSS rendszerek
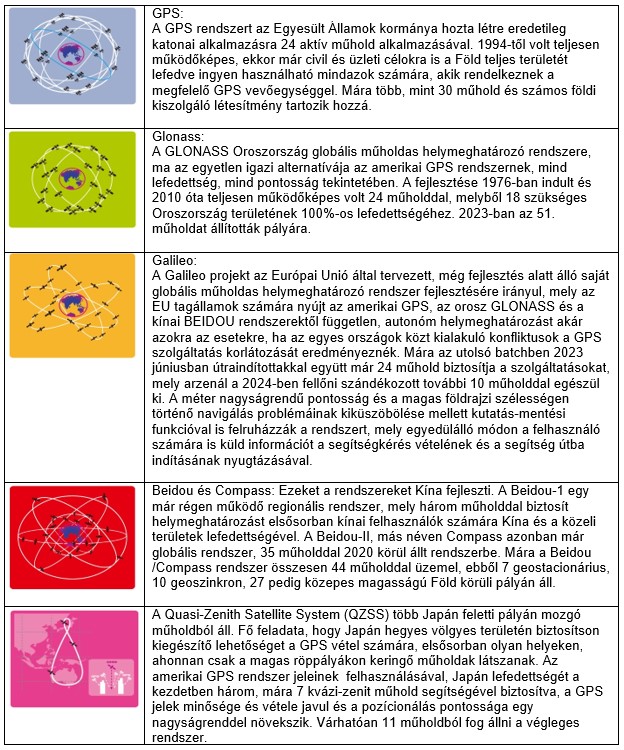
[1] A GNSS műholdrendszerek áttekintése
GNSS modulok (konkurens multi-GNSS vétel)
A műholdas navigációs rendszerek működésének minőségét négy fő kritérium határozza meg:
Pontosság: A maximálisan megengedett eltérés a mért és valós földrajzi koordináták, sebesség és irányértékek között
Integritás: A rendszer azon képessége, hogy miként marad megbízható és hogyan reagál abnormális körülmények közt.
Folytonosság: A rendszer folytonos, megszakításoktól mentes működésre való képessége
Elérhetőség: Az a maximális időintervallum, mely alatt a jel megfelel a pontosság, az integritás és a folytonosság kritériumainak.
Ahhoz, hogy a GPS vevő megfelelően működjön minimálisan négy szatellit egyszerre való láthatósága a feltétel, azonban a lehető legjobb jelminőség hat vagy nyolc műhold egyidejű vételét igényli. Nem minden helyen és időben van lehetőség erre, elsősorban zavaró tereptárgyak és objektumok (hegyek, magas épületek, fák) közelében nehezebb megfelelő számú kapcsolatot létesíteni. A különböző GNSS rendszerek egyidejű használatával sokkal több műhold áll rendelkezésre a lehető legpontosabb pozíció meghatározásra. Így például kombinált GNSS vevők használatakor a 24 GPS műhold mellett a GLONASS műholdak is rendelkezésre állnak, mely precízebb jeleket eredményez, valamint kiküszöbölhető a GPS rendszerben a magas földrajzi szélességen történő navigálás problémája is, amikor a GPS holdak egy része a vevőegység horizontja alatt van.
A kombinált GNSS vevők a különböző globális műholdas helymeghatározó rendszerek jeleinek kombinációit detektálják, léteznek GPS+GLONASS és későbbi használathoz GPS+GALILEO rendszerek, melyek jelentősen csökkentik az első pozíció meghatározás idejét (TTFF- time to first fix)
A különféle kommunikációs modulokba integrált, vagy különálló GNSS vevők chipsetjei támogatják a konkurens multi-GNSS vételt (GPS, GLONASS, Beidou, Galileo, QZSS), melynek eredménye a nagypontosságú helymeghatározás mind városi, mind külterületi környezetben.
A pozíció meghatározás mellett a műholdas navigációs rendszerek még egy fontos adatot szolgáltatnak, az időt. Minden egyes szatellit rendelkezik egy vagy több atomórával, és a kibocsátott GPS jelek tartalmazzák az időre vonatkozó információt is. A vevőegységek dekódolják ezt a jelet és szinkronizálják magukat. Rendkívül drága atomórák üzemeltetése helyett GNSS vevőkkel precíz időinformációhoz juthatunk, mely nagyon nagy gyakorlati jelentőséggel bír. Kommunikációs, forgalomirányító, pénzügyi és energia elosztó rendszerek mind igénylik a precíz időzítést és szinkronizálást, a GPS alapú időzítés pedig rendkívül olcsón teszi lehetővé ezt. Számítógépes hálózatok számára időalapot, bankkártya műveletek vagy IoT eszközök számára időbélyeget szolgáltatnak, és például rádióállomások szinkronizálását legköltséghatékonyabban így lehet biztosítani. Földrajzilag távol helyezkedő elemekből felépülő elosztott hálózatok működtetéséhez is pontos időzítés szükséges, így például az energiatermelő és elosztó cégek számára is feltétlenül szükséges a szinkronizálás a villamos hálózatban esetlegesen fellépő hibák egyes hálózati szegmensekben való lokalizálására.
LBS az Endrich E-IoT board család használatakor
LBS (Location Based Service), amely a távközlési mobilszolgáltató rádiókommunikációs hálózatán (például GSM-hálózat, CDMA-hálózat) keresztül szerzi be a mobil-okosszenzor helyinformációit (földrajzi koordinátáit vagy geodéziai koordinátáit). Az LBS egy hozzáadott érték szolgáltatás, amely az információs rendszer (angol rövidítése: GIS, Geographic Information System) platform támogatása mellett megfelelő szolgáltatásokat nyújt a felhasználóknak. GIS szervereket számos cég és civil szervezet üzemeltet, ezek a szerverek alkalmasak arra, hogy adatbázissá szervezve tárolják a világon gyakorlatilag bárhol elhelyezkedő mobil távközlési tornyokhoz tartozó helykoordinátákat, címeket, melyeket a GSM modemek parancskészletéhez tartozó GIS utasításkészlettel le lehet kérdezni. Erre részletes példát mutatunk be a cikk következő részében. Mivel a mobil eszközzel kapcsolatban lévő adótorony koordinátáit ismerjük csak, sok esetben párszáz méteres pontosság érhető el, ami nagyban függ a kapcsolódás módjától. Mivel az NB-IOT jelterjedési tulajdonságai nagyon jók, kevesebb toronyra van szükség, így itt a pontosság a nagyobb eszköz-torony távolság miatt kisebb, mint hagyományos LTE kapcsolat esetén. Helymeghatározási stratégiánkban ezt a tényt is figyelembe kell venni. Egy ilyen GIS szolgáltató az OpenCellID, ahol regisztráció után kapunk egy olyan kulcsot, amit a modem AT parancskészletében lévő GIS parancsok kiadásakor paraméterként használva jogosultságot szerzünk a cellainformáció alapján a helyadatok lekérdezésére. Az elhelyezkedés és a pontossági rádiusz is megérkezik a parancsra érkező válaszban.
Másik ilyen jellegű helymeghatározási stratégia az egyes GSM modemek által támogatott WiFi Scan technológia, ami az elérhető és ismert pozíciójú WiFi hotspot / AP lekérdezésével nyer (beltéri) helyinformációt.
WiFi alapú beltéri lokalizáció
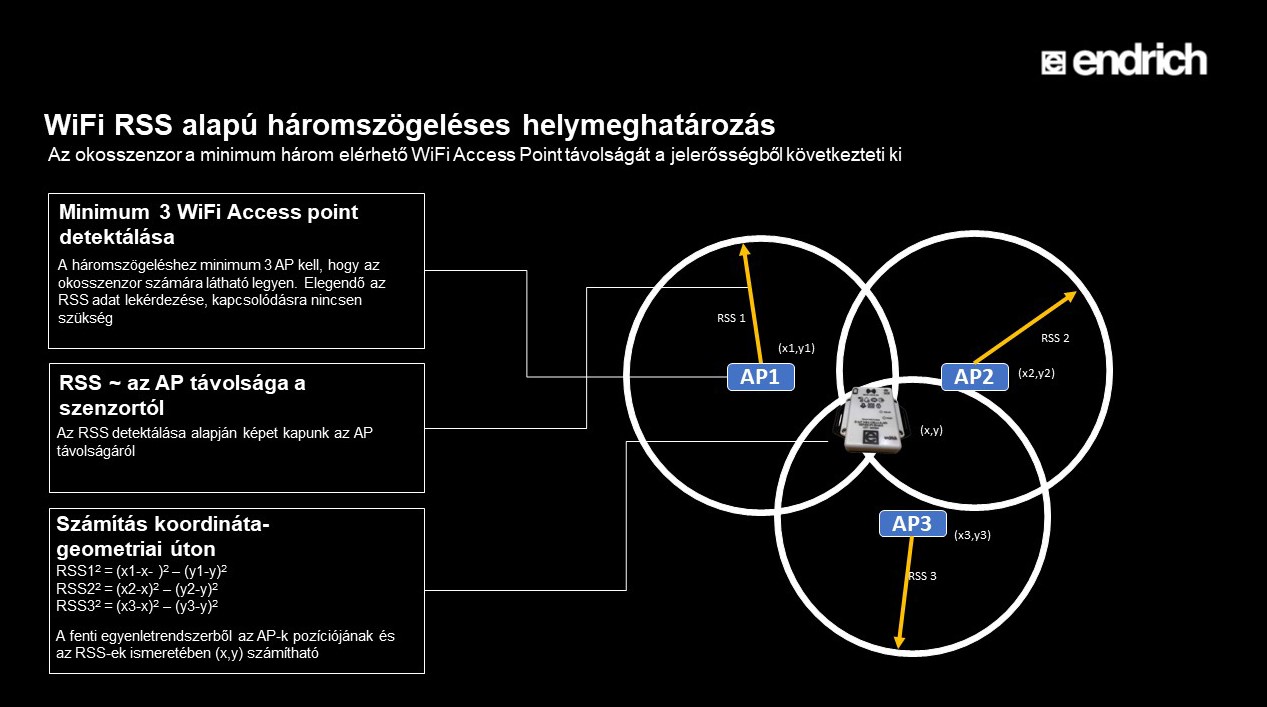
A WiFi a kommunikációhoz az IEEE 802.1 szabványt használja, és az ebben a specifikációiban meghatározott 2,4 vagy 5 GHz-es frekvenciájú rádióhullámok útján kommunikál. A technológia kapcsolódás és adattovábbítás nélkül is használható a csatlakoztatott eszköz helyének meghatározására. A Wi-Fi helymeghatározás a már meglévő infrastruktúrát és Wi-Fi hozzáférési pontokat (AP-k) használja az IoT eszköz elhelyezkedésének kiszámításához. Az eszköznek képesnek kell lennie felderíteni a Wi-Fi hozzáférési pontokat, de nem kell csatlakoznia hozzájuk. A Wi-Fi helymeghatározó rendszerekben a lokalizáció a legalább 3 Wi-Fi AP-ből érkező jel erősségétől és az AP-k elhelyezkedésétől függ. A Wi-Fi relatív rövid hatótávolságú ezért az eszköz és a hozzáférési pont távolsága nagyjából 150 méter körül lehet. A pontosság általában az AP-k számától és a fizikai környezettől függ. A helymeghatározás és a lokalizáció pontosabb, ha egy adott területen több hozzáférési pont van. A Wi-Fi körülbelül 20 méteres pontosságot tud nyújtani a meglévő, tömeges forrásból származó Wi-Fi infrastruktúrával kalibrálás nélkül. A kalibráció, felmérés és finomhangolás révén azonban a Wi-Fi helymeghatározás 5-8 méteres pontosságot érhet el beltéri környezetben. Számos módszer létezik a beltéri helymeghatározás Wi-Fi segítségével történő megvalósítására. A két elsődleges módszer a vételi jel erősségét (RSS) és a WiFi ujjlenyomatot használó metódusok. A Wi-Fi jel RSS-je fordítottan arányos a távolsággal. A MAC-cím minden Wi-Fi útválasztó esetében egyedi, és az RSS-ből durva távolságmeghatározási adatokat tudunk nyerni. Az RSS erős, ha a felhasználó közel van a Wi-Fi hozzáférési ponthoz, és gyenge, ha a felhasználó távol van. Az olyan akadályok, mint a falak, bútorok és emberek gyengítik a jelerősséget, ami kihívást jelent a helymeghatározás pontosságának tekintetében. A gyenge RSS jelentheti, hogy vagy az AP-től való távolság túl nagy, vagy az akadályok korlátozzák a teljesítményt. Kétféleképpen lehet használni a WiFi MAC-címeket és az RSS-t a WiFi helymeghatározáshoz.
Az első módszer a Wi-Fi Trilateration (háromszögelés) használatához minden Wi-Fi router helyének ismerete szükséges. Ezután az IoT eszköz az észlelt RSS alapján megbecsüli az egyes látható Wi-Fi útválasztóktól vett távolságot, és e távolságok alapján kiszámítja a saját pozícióját.
WiFi ujjlenyomat
A Wi-Fi „ujjlenyomat-vétel” jelentősen javíthatja a pontosságot. Az ujjlenyomat-készítés a korábbi RSS-információkat, valamint az ismert helyeket használja az eszköz helyzetének meghatározásához az aktuális RSS-értékei alapján. Az ujjlenyomat-készítés nagymértékben függ a környezettől, ezért az ujjlenyomat-adatok frissítése a környezet módosításával szükséges, legyen szó egy kis bútor áthelyezéséről vagy válaszfalak kialakításáról. A Wi-Fi-ujjlenyomat-térkép összeállítása időigényes lehet, és helyszíni felmérést igényel, de általában pontosabb eredményeket ad, mint a Wi-Fi-trilateráció.
Sok esetben elegendő helymeghatározási eredményt adhat IoT eszközök számára az előre ismert – a hatókörben lévő- WiFi Access pontok meglétének vizsgálata. Amennyiben ellenőrzéskor jelentős változás van a látható WiFi routerekben, feltételezhető, hogy a szenzor máshol van, mint ahová eredetileg telepítették. Ez a módszer ugyan az új helyzetről nem ad semmilyen információt, mégis alkalmas a helyzetváltoztatás tényének megállapítására, ami indíthat speciális üzeneteket, riasztást, vagy feltételezve, hogy a szenzor akár átmenetileg kültéren is lehet, bekapcsolhatja a GNSS alapú helymeghatározást.
A cikksorozat következő részében konkrét példákat fogunk bemutatni az E-IOT eszközök GNSS és LBS képességeiről és ezek használatáról.
Kiss Zoltán, Export Igazgató – Head of R&D